HYDACin uuden sukupolven sähköhydraulinen apuohjausjärjestelmä
Anturitiedon pohjalta toimivan ohjausjärjestelmän perusideana on, että perävaunun yhtä tai kahta lisäakselia ohjataan traktorin ja perävaunun välisen kulman perusteella. Hydac on esitellyt uuden järjestelmän, jossa erillinen kulma-anturi on korvattu kallistuskulmaa ja kiihtyvyyttä mittaavalla yksiköllä. Tämä tuo monia etuja.
HYDACin sähköhydraulinen apuohjaus
Anturitiedon pohjalta toimivan ohjausjärjestelmän perusideana on, että perävaunun yhtä tai kahta lisäakselia ohjataan traktorin ja perävaunun välisen kulman perusteella. HYDAC on esitellyt uuden järjestelmän, jossa erillinen kulma-anturi on korvattu kallistuskulmaa ja kiihtyvyyttä mittaavalla yksiköllä. Tämä tuo monia etuja.
Sähköhydrauliset ohjausjärjestelmät ovat yleistymässä erilaisissa hinattavissa ajoneuvoissa. Tavoitteena on saavuttaa tarkempi ja nopeampi hallinta hinattavan ajoneuvon liikeratoihin, ja siten esimerkiksi entistä parempi ajovakaus.
Myös maatalouden perävaunuissa ja hinattavissa työkoneissa sähköhydrauliset ohjausjärjestelmät ovat yhä yleisempiä. Osasyynä tähän kehitykseen on tieliikenteen aikaisempaa tiukemmat määräykset ja standardit, jotka edellyttävät nykyään parempaa ohjattavuutta. Sen lisäksi peltomaan tiivistymisen ja muiden vaurioiden estäminen edellyttää perävaunulta tai hinattavalta työkoneelta tarkempaa vetokoneen seuraamista ja ajovakautta.
Agritechnica-messuilla oli esillä HYDACin kehittämä sähköhydraulinen apuohjaukseen tarkoitettu järjestelmä, joka koostui hydrauliikan, anturien ja ohjelmiston osalta erillisistä moduuleista. HYDACin mukaan modulaarisuus mahdollistaa tässä tapauksessa monipuolisen ja helposti muunneltavan käytön erilaisten perävaunujen ja työkoneiden rungoissa (jatkossa mainitaan tilan säästämiseksi vain perävaunu).
Järjestelmän perusideana on, että perävaunun yhtä tai kahta lisäakselia voidaan ohjata jäykän pääakselin mukaan. Tavoitteena on parempi seuraavuus säätämällä lisäakselien ohjauskulmaa ja sovittamalla se jäykän akselin määräämään kääntösäteeseen.
Nykyisin käytössä oleva tekniikka: kulma-anturi vetoaisassa
Perävaunun kääntösäde riippuu vetävästä ajoneuvosta ja hinattavasta laitteesta. Nykyään käytettävissä järjestelmissä mitataan vetäjän ja perävaunun välinen kulma kulma-anturilla, joka on kiinnitetty vetoaisan viereen, sen päälle tai jopa sisään.
Anturin akselia käännetään mekaanisella vivustolla, joka on kytketty mahdollisimman lähelle ajoneuvon vetolaitetta. Kulmatieto välitetään ohjausyksikölle, joka käsittelee mittaustiedot ja ohjaa yhtä tai useampaa sähköhydraulista venttiiliä siten, että lisäakselit kulkevat samalla kääntösäteellä. Ohjauspiirin takaisinkytkentää varten jokainen ohjaava akseli on varustettu vähintään yhdellä mittausanturilla, jotta ohjain tietää, missä asennossa ohjausakselit ovat. Mittaukseen voidaan käyttää joko kulma-anturia tai lineaarianturia. Anturi voi olla myös integroitu ohjaussylinteriin, sen sisälle.
Ohjauksessa tarvitaan yleensä myös tieto ajonopeudesta. Nopeustietoa mitataan yleensä vähintään yhdellä nopeusanturilla, joka poimii renkaan nopeuden hinattavan laitteen jäykältä akselilta. Nopeustiedon avulla voidaan vähentää lisäakselien ohjauskulmaa nopeuden kasvaessa, jotta ajoneuvoyhdistelmä pysyy vakaana myös suurissa nopeuksissa.

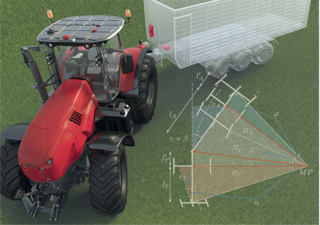
Traktorin ja perävaunun muodostaman yhdistelmän kääntyessä kiinteiden akseleiden linjat leikkaavat kääntöympyrän keskipisteessä (MP). Perävaunun kääntyvien akseleiden optimaaliset kulmat riippuvat muun muassa yhdistelman akseleiden keskinäisestä etäisyydestä ja nivelpisteen sijainnista. HIT 1500 -anturin suorittaman mittauksen ja ajoneuvon nopeustiedon avulla HYDACin järjestelmän ohjainyksikön laskentaohjelma pystyy määrittämään perävaunun kääntyvien akseleiden kulmat ilman ajoneuvoyhdistelmän mittatietoja.

Ajoneuvon ja vetoaisan välisen kulmatiedon käytössä on haasteita. Kulma-anturin järkevä ja turvallinen sijoittaminen vetoaisalle ei aina ole helppoa. Mekaaninen vivusto kulma-anturin ja vetävän ajoneuvon välillä on altis ulkoisille mekaanisille rasituksille. Lisäksi vivusto pitää olla helposti irrotettavissa, kun peräkärry tai työkone halutaan irrottaa.
Ensimmäisessä käyttöönotossa ohjelmisto ja anturit pitää myös kalibroida sopimaan yhteen vetävän ja vedettävän koneen yhdistelmälle. Jos traktori ja perävaunu eivät ole tällöin täsmälleen suorassa tai mekaanisen kytkennän geometria kunnossa, niin perävaunu ei seuraakaan vetäjää oikein. Myös mahdollinen mekaaninen vaurio tai muutos laitteissa aiheuttaa virhettä ohjaukseen ja edellyttää yleensä uutta kalibrointia.
Käyttäjän näkökulmasta iso ongelma on ollut, että eri traktoreiden kanssa ei voikaan välttämättä käyttää kaikkia peräkärryjä tai työkoneita, vaan niiden käyttö on rajoitettu vain yhteen tai ehkä muutamaan traktoriin. Tämä on huomioitava traktoreita, peräkärryjä ja työkoneita valittaessa.
HIT 1500 -anturi kiinnitetään hinattavaan ajoneuvoon. Tällaisten kallistuskulma-anturien toiminta perustuu maan vetovoimakentän mittaamiseen kiihtyvyysantureilla (MEMS). Lisäksi anturiin on integroitu nopeiden muutosten suodatus- ja kompensointitoiminto, joka estää virheelliset mittaukset esimerkiksi ajoneuvon tai peräkärryn heilahdellessa epätasaisessa maastossa.

HYDACin kehittämä uusi järjestelmä
Uudessa järjestelmässä traktorin ja perävaunun välisen kulmanmittauksen haasteet on ratkaistu käyttämällä uudenlaista anturiteknologiaa, johon perustuen lisäakselien kulmaa voidaan ohjata ilman että traktorin ja perävaunun välistä kulmaa tarvitsee mitata erillisellä anturilla.
Järjestelmä perustuu HIT 1500 -sarjan kallistuskulma-anturiin (inclinometer). HIT on yksi- tai kaksiakselinen anturi, joka mittaa kaltevuuskulmaa vaakatasoon nähden. Anturi on erittäin tarkka ja vankka, ja hyvin suojattu ulkoisilta kolhuilta sekä ympäristöolosuhteilta.
Varsinaisen kulmamittauksen lisäksi anturi mittaa myös kääntymisnopeutta ja -kiihtyvyyttä kolmeen suuntaan. Anturin antaman mittaustiedon ja nopeustiedon perusteella ohjain laskee tarvittavat kääntökulmat lisäakseleille ja ohjaa kulma-anturien antaman tiedon perusteella sähköhydraulisilla venttiileillä lisäakselit oikeaan kulmaan.
Anturin ja ajoneuvon mekaanisen liitännän poistumisesta seuraa, että apuohjausjärjestelmä on omavarainen ja riippumaton traktorista. Ohjaus vaatii vain hydraulisen ja sähköisen energian traktorista tai hinattavasta koneesta.
Käyttäjän kannalta tämä tarkoittaa, että voi käyttää mitä tahansa perävaunua tai työkonetta samalla traktorilla. Vetolaite voi olla kita-tyyppinen, vetokoukku, tai kuula, eikä käytettäviä laitteita tarvitse enää määritellä järjestelmälle.
HIT-anturin asennus on myös erittäin helppoa, koska se voidaan kiinnittää mihin tahansa paikkaan perävaunun tai hinattavan työkoneen runkoon.
Käytännön kokemuksia
Valmistajan testiradalla ajetut ja kentällä saamat tulokset ovat olleet erittäin positiivisia. Apuohjauksen vaatimia hydraulipaineita mitattaessa havaittiin, että nykyisillä ratkaisuilla (vetolaitteeseen kiinnitettävällä kulma-anturilla varustetut järjestelmät) pienikin poikkeama vetoaisan kääntökulman ja järjestelmän kalibroinnissa saattoi aiheuttaa huomattavan lisäyksen apuohjauksen vaatimassa painetasossa ja siten apuohjauksen ottamassa tehossa. HIT-anturilla toteutetussa apuohjauksessa tätä ongelmaa ei esiintynyt. HIT-anturia käytettäessä peräkärry seurasi ajoneuvoa erittäin hyvin myös alhaisilla ajonopeuksilla.
Lisäksi järjestelmällä on mahdollista toteuttaa erilaisia lisätoimintoja, kuten nopeudesta riippuva ohjaus ja ohjauskulman pienennys sekä erilainen käyttäytyminen eteen- ja taaksepäin ajettaessa. Järjestelmä mahdollistaa myös manuaalinen ohjauksen tai kääntötoiminnon kytkemisen pois päältä. Erityisesti manuaalinen ohjaus voi olla erittäin hyödyllinen, kun liikutaan hyvin ahtaissa tiloissa.
Standardin CAN-liitännän lisäksi ohjaus voidaan liittää ajoneuvon ohjaimeen myös käyttäen erillistä 7” näyttöä (HY-eVision2 7 "). Näytön kautta voi määritellä tarvittavat asetustiedot, tehdä ohjaustilan valinnat ja saada vikadiagnostiikkatiedot.
Hyvin tärkeä, kaikkia ohjausjärjestelmiä koskeva, asia ovat toiminnallisen turvallisuuden vaatimukset. Käytettävien komponenttien lisäksi myös ohjelmiston pitää täyttää kaikki käytettyjen standardien turvallisuusvaatimukset. HYDACin lisä- ja apuohjausjärjestelmä täyttää standardien EN ISO 13849 PL d sekä ISO 25119 AgPL d tasovaatimukset.
Koko HYDAC-ohjausjärjestelmä sovellusohjelmistoineen on kiiteä kokonaisuus, jota voidaan ilman erillistä hyväksyntää sovittaa käytettävän kaluston mukaan. HYDACilta halutaan korostaa, että sähköhydraulisen apuohjauksen modulaarinen ja asennusvalmis ratkaisu helpottaa kone- ja laitevalmistajien omaa tuotekehitystyötä.
Laitevalmistajan kannalta suurimmat edut ovat varmasti kehityskustannusten vähentyminen, ja se, että järjestelmä täyttää kaiki vaaditus toiminnallisten turvallisuusvaatimukset, minkä ansiosta kokonaisaikaa uuden tuotteen lanseeraamisessa lyhenee.
- Artikkeli on julkaistu Koneviesti 12/2020
- Alkuperäinen artikkeli julkaistu lehdessä ”Mobile Maschinen” 6.11.2019
- Alkuperäiset kirjoittajat: Birgit Kiemle, HYDAC Electronic ja Georg Komma, HYDAC Mobile Hydraulics
